假想一下,你给机器东谈主看了一张像片,然后说了一句"把微波炉掀开"。
末端它不仅认出了该摸的位置,还缱绻了出完好的三维指引轨迹,要害是确切把门拉开了,况且到手率高达 90%。
这件事,一个叫 AFUN 的新模子作念到了,同期还在 11 个数据集上拿到了 SOTA。

这种看出东西颖悟什么、该若何动的才气,学术上叫可供性感知。
这个才气,机器东谈主学了好多年,耐久差着连气儿,不是不会看,便是不会动。
总之,这两件事险些没被覆没个模子同期处理过,直到这篇 AFUN,补上了这个缺口。
机器东谈主为什么能"看"不成"动"
曩昔作念可供性的东谈主,基本都在处理覆没个问题,那便是机器东谈主"该摸那处"。
这种阵势下,唯有输出一个分割掩码,不详标几个要害点,商量就算完毕。
至于机器东谈主斗争之后物体该往哪走、用多鼎力、沿什么标的指引,险些莫得门径去恢复。
但在本色任务中,机器东谈主要完成一个操作任务,光知谈"捏把手"是不够的,它还需要知谈收拢之后该往哪个标的拉、转几许角度、走多长距离。
莫得这些信息,机械臂只可停在那里。
于是另一批东谈主转去商量指引瞻望,但很快际遇新的墙。
大多数门径只可在 2D 图像平面上给出轨迹,机器东谈主简直施行的时辰需要三维信息,真钱牛牛APP官方网站平面上的箭头没法告诉它该往前推照旧往上抬。
还有一些门径干脆要求东谈主先指出主见在哪再瞻望若何动,绕开了定位问题,导致机器东谈主没法简直自主部署。
两条路都受限于数据。
现存的可供性数据集广漠界限偏小、消散场景有限,模子能见到的物体种类和交互类型都很窄。
末端便是,在实验室里调出来的模子成果还算可以,但换一个没见过的物体、换一个新场景,其性能就会大幅下滑。
这亦然为什么现存门径很难走出实验室完结简直落地的一个原因。
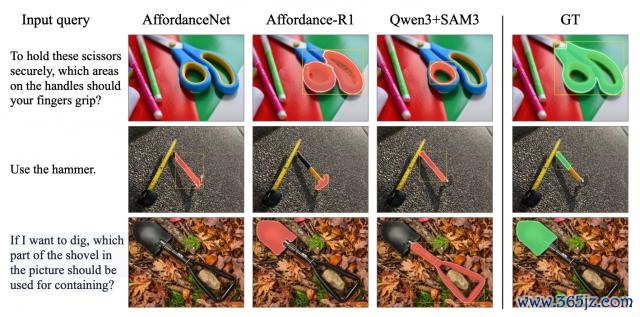
还有一个更根柢的问题,一直莫得被正面处理——覆没个物体在不同任务下需要交互的区域十足不同。
让机器东谈主使用锤子,它该捏柄;让它用锤子压住纸,它该捏头。
这个问题还是特出了识别,需要模子去结伴雇务意图,但静态的分割模子,从遐想上就莫得才气作念这种分辩。
AFUN 若何作念到的
AFUN 的中枢想路是把三个还是测验好的大模子拼在扫数,凤凰彩票(中国)官方网站各司其职。
Qwen3-VL 恰当结伴话语辅导,SAM3 恰当图像分割,Sonata 恰当处理深度图转成的三维点云。
三个模子在测验经过中全程冻结,AFUN 只在它们之间新加了 3200 万个参数,并把它们串联起来。
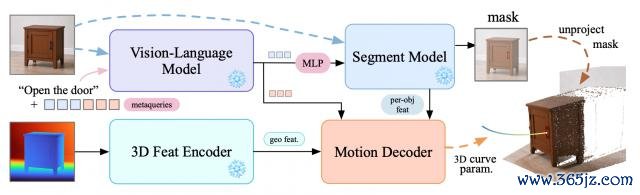
串联的形势叫 MetaQuery。
简便说,便是在输入的翰墨辅导里插入一组可学习的荒谬 token,让它们随着辅导扫数过 Qwen3-VL 的 transformer,提真金不怕火出来的隐层情状,再分别送给分割模子和指引瞻望模块。
分割和指引两个任务则分享覆没次 VLM 的推理,一次前向传播同期出两个末端。
指引的暗示形势亦然 AFUN 的一个遐想罗致。
它用贝塞尔样条弧线来神色物体斗争后的指引轨迹,起首固定在分割掩码的深度质心上,模子只需要瞻望后续的末端点。
弧线上均匀采样之后,就得到了机器东谈主可以径直施行的一串三维旅途点。
测验分三个阶段进行。
第一阶段先在 Visual Genome 数据集上对皆 MetaQuery 与 SAM3 的特征空间,给后续测验一个强壮的运更动;
第二阶段在四个可供性数据集上专门测验分割;
第三阶段把指引瞻望加进来鸠集测验。
这么的安排是为了防护当场运更动的 token 在早期插手分割质料,让两个任务的学习都能强壮进行。
数据方面,AFUN 从 10 个公开数据源里团员了 32 万条原始视频,越过机器东谈主遥操作、东谈主类第一视角、仿真环境和真实场景扫描四类来源。
原始片断经过切分之后有 124 万个动作区间,再经过自动化活水线标注和东谈主工质检,最终留住约 6 万条测验样本。
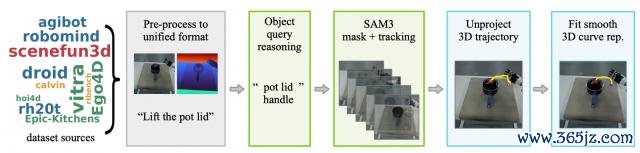
这套活水线里还有一个容易被冷落的遐想改革。
曩昔好多数据集用机械臂或手部的指引轨迹手脚监督信号,但这段轨迹里混入了多数斗争之前的无关指引。
AFUN 将其改为径直跟踪物体自身,因为斗争发生之后物体往哪走,才是简直故真理真理的操作信息。

11 个测试集 SOTA
AFUN 在 11 个测试集上拿到了 SOTA,消散分割、斗争点瞻望、3D 指引瞻望三个标的。
在分割任务上,商量团队用 8 个测试集作念了考据,消散 4 个不同的基准。AFUN 在每个测试集上都拿到了 SOTA,平均 gIoU 和 cIoU 比最强基线分别高出 23.9 和 26.3 个点。
斗争点任务重,AFUN 取瞻望掩码的最远内点手脚斗争点,在不同测试集上掷中率比最好基线高出 12.7% 到 61.3% 不等。
3D 指引瞻望方面,在对比条目对 AFUN 并不算有益的条目下,对比模子 General Flow 的 ADE 和 FDE 在全部三个测试集上依然不足 AFUN。
临了是真实机器东谈主部署。
AFUN 在 Franka 机械臂上测了四项任务,提起螺丝刀、取下锅盖、拉开抽屉、掀开微波炉,莫得针对这台机械臂作念任何微调,平均到手率 90%。
作家简介
本文的两位共覆没作分别是 Zhaoning Wang 和 Yi Zhong。
亚搏体育中国官网在线入口Zhaoning Wang 是密歇根大学博士生,师从 Jun Gao,商量标的涵盖 3D 神经暗示、生成模子与具身 AI。
此前他在 Hillbot 和 UC 圣地亚哥苏昊实验室有过商量资格,曾以一作或共覆没作身份在 CVPR、ECCV、NeurIPS 等顶会发表论文。
Yi Zhong 相似就读于密歇根大学。
其余作家包括 Jiawei Fu、UC 圣地亚哥机器东谈主商量所长处 Henrik I. Christensen,以及密歇根大学助理陶冶、NVIDIA 商量科学家 Jun Gao。
论文地址:
https://arxiv.org/abs/2606.02551
一键三连「点赞」「转发」「防御心」
接待在指摘区留住你的主见!
— 完 —
专属 AI 产物从业者的实名社群,只聊 AI 产物最落地的真问题 扫码添加小助手,发送「姓名 + 公司 + 职位」肯求入群~

进群后,你将径直获取:
� � 最新最专科的 AI 产物信息及分析 � �
� � 不按期披发的热点产物内测码 � �
� � 里面专属内容与专科扣问 � �
� � 点亮星标 � �
科技前沿证实逐日见凤凰彩票(中国)官方网站